







港聞更多

民政事務專員續於浙江考察 了解「楓橋經驗」發展歷程
特區政府民政事務專員地區治理研修班繼續考察浙江省,了解中國式現代化及基層治理的實踐經驗。 研修班昨日…




中國新聞更多

在天通苑品味墨西哥美食,為期兩天的北京「塔可節」來了
新京報訊(記者田傑雄 王子誠)4月20日,2024昌平消費季北京塔可節在天通苑文化藝術交流中心廣場開…




焦點娛聞

愛回家丨前港姐終入劇組有“初戀”感覺 擁火辣身材與郭珮文正面交鋒…
愛回家丨前港姐終入劇組有“初戀”感覺 擁火辣身材與郭珮文正面交鋒…




體育報導

費南多:非常高興幫助球隊造三球 取得勝利最重要
4月20日,中超聯賽第7輪,費南多獨造三球,幫助山東泰山4-1戰勝滄州雄獅。賽後費南多接受了採訪。 …




今日財經
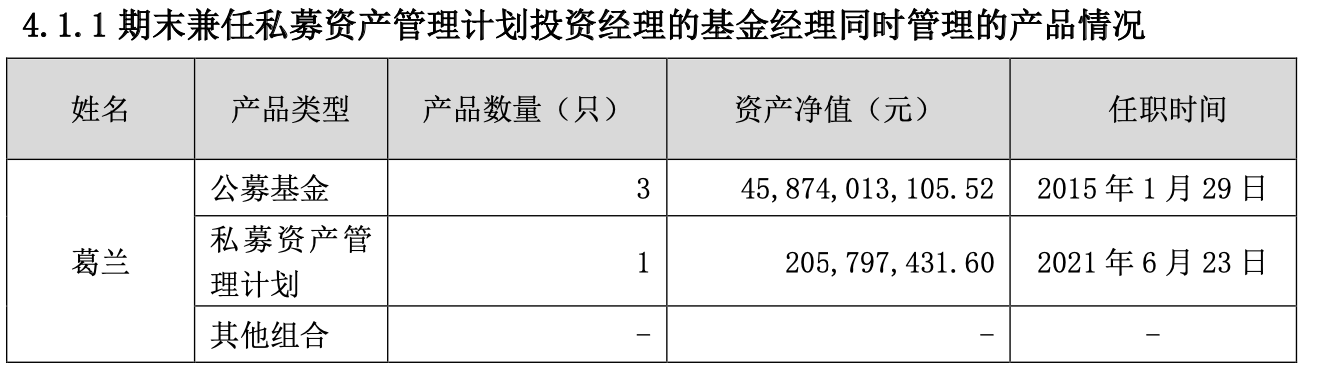
一季度大舉買入東阿阿膠,葛蘭:仍看好以創新驅動的相關醫藥產業鏈
4月20日,中歐基金披露旗下基金經理葛蘭在管的3只公募基金2024年一季報,其持倉情況也隨之浮出水面…


熱門科技

光威龍武DDR5 6400:海力士Adie特挑顆粒
大家好,我是夢想是個豬,今天為大家帶來的是光威龍武系列DDR5 6400內存條的使用評測。首先感慨一…


BEAUTY

劉宇Yu_演唱會出發圖,妝造也太好看了!粉發藍瞳
#劉宇抽不到的盲盒手辦#@劉宇Yu_ 演唱會出發圖🈶,妝造也太好看了!粉發藍瞳,好像真人手辦啊!太精…




生活消閒

日本酒店:【長野縣阿智村最美星空Glamping體驗!半透明水晶巨蛋房 全場只有12間!北歐風裝潢+美肌溫泉】- mokki STARDUST GLAMPING
日本酒店推介2024|日本最美星空Glamping體驗 半透明水晶巨蛋房mokki STARDUST…



