







港聞更多

環保署回應傳媒有關新田/落馬州發展樞紐環評報告的查詢
就傳媒有關新田/落馬州發展樞紐環評報告的查詢,環境保護署(環保署)今日(四月十七日)作出以下回應:<...




中國新聞更多
自然資源部:日本四國島海域6.5級地震不會對我國沿岸造成災害性影響
新京報訊 據國家預警發佈官博消息,2024年04月17日22時14分(香港時間),日本四國島海域(3…


焦點娛聞

NCT道英為solo出道專輯準備的PPT
【Theqoo】NCT道英為solo出道專輯準備的PPT,包括了專輯的概念、Intro Film、D…




體育報導
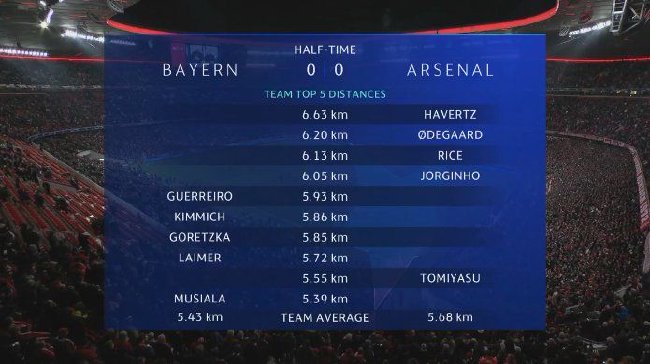
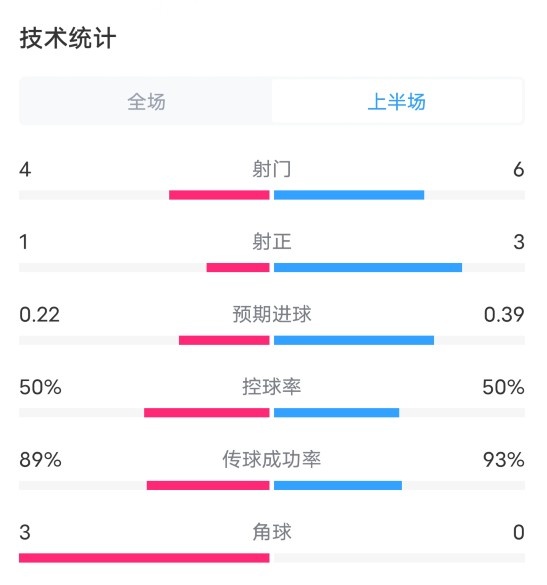
拜仁vs阿仙奴半場跑動距離:哈伐斯6.63公里居首
歐冠盃8強次回合,拜仁半場0-0阿仙奴。 據數據統計,哈伐斯半場跑動6.63公里居全場第一,跑動距離…



今日財經

財政司司長出席「香港──內地企業的跨國供應鏈管理中心」研討會致辭
以下是財政司司長陳茂波今日(四月十七日)由特區政府投資推廣署、駐上海經濟貿易辦事處、香港貿易發展局和…



熱門科技

Braid, Anniversary Edition 已推遲到 5 月
自2020年宣佈將於2021年推出Braid的重製版以來,我們還沒有聽說過任何消息,所以當Thekl…


BEAUTY

莊達菲要一直努力獨家路透來咯
#LV明星路透#@莊達菲要一直努力 獨家路透來咯,今日亮相上海,準備赴約路易威登寰遊時裝秀。她身穿M…




生活消閒
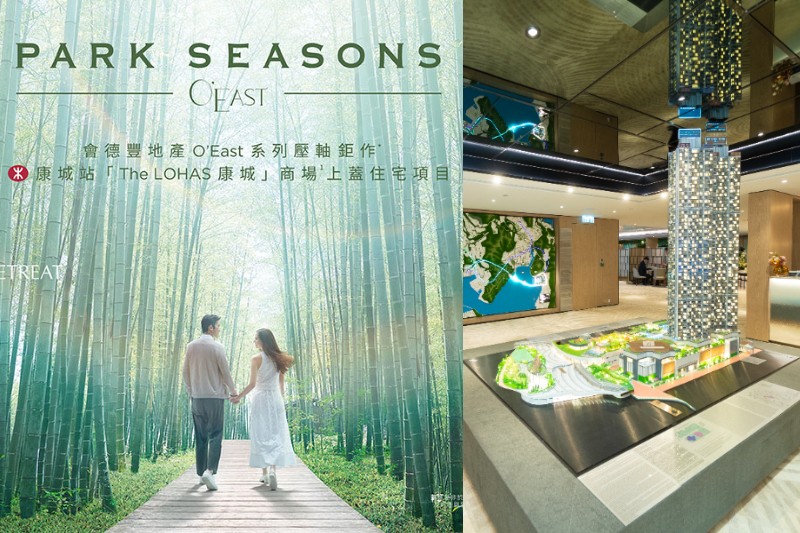
將軍澳好去處|4大將軍澳拍拖勝地推薦!必去溜冰場、海景Café【同場加映:康城全新人氣樓盤 PARK SEASONS最啱二人世界!】
【將軍澳好去處】想跟另一半享受甜蜜的周末?四大將軍澳拍拖好去處推薦!有溜冰場、海景Cafe、單車館、…


